|
Tidewater |
2007 ASEE Model Design Competition |
|
TCC's team made a significant design change to their robot
a couple of days before the competition, switching from a dead-reckoning
approach (counting wheel revolutions) to using range-finding sensors to
position the robot before each basket.
The new design worked well, but needed a little more fine tuning as
the robot would sometimes just touch the basket or a ball would just miss the
basket. With some slight improvements,
the robot would likely have been a strong contender, but settled for 7th
place in the event. |
|||
|
Team Members: |
Faculty Advisors: |
||
|
|
|
|
|
|
Corey starts the robot at the judge’s signal. |
|
|
|
The robot reaches
the opposite end of the track. |
Team Photo in
Honolulu |
|
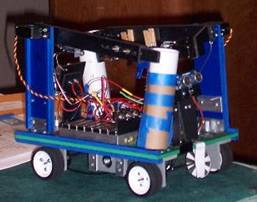
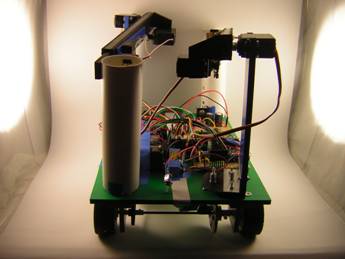
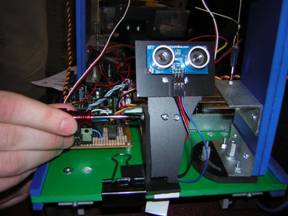
Side view of robot |
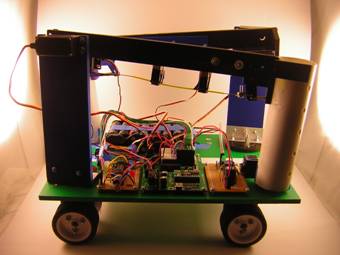
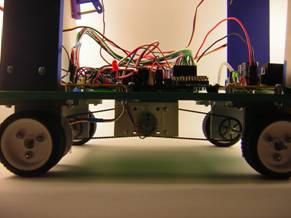
Battery side view |
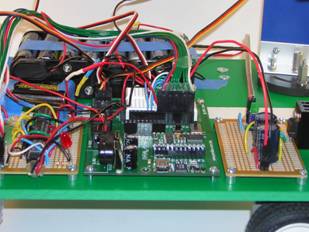
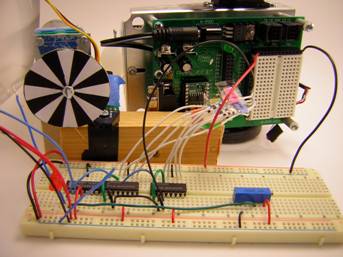
Circuit Boards |
|
End view |
End view - closeup |
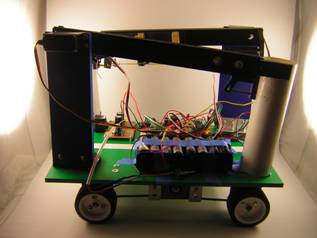
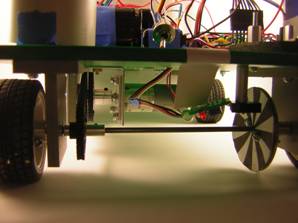
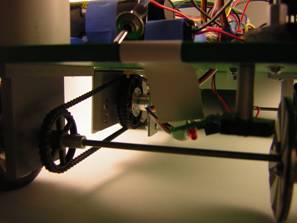
Side view showing chain drive |
|
Prototype of wheel counting circuit |
Wheel revolution counter in place |
Wheel revolution counter later replace by Ping distance sensors |
|
Chain Drive |
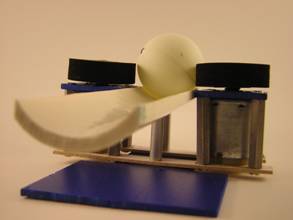
Early experiment to see if balls could be accurately
launched 5 feet (or so) into a basket.
Dual motor launcher. |
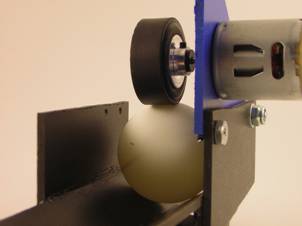
Single motor launcher. Attempts to launch balls weren’t very successful. |









Contact Paul Gordy, ASEE Model
Design Competition Coordinator, at PGordy@tcc.edu for more information.